INVESTIGATION OCEANOGRAPHIQUE ET OANIS Nos questions Ufologiques nous orientent vers le cosmos, cependant certaines réponses pourraient venir des Abysses
Le prototype de rayon laser que la Navy espère monter sur un de ses navires en 2014 U.S. Navy photo by John F. Williams/Released
PROTOTYPE. Lundi 8 Avril, les responsables de la Navy (les forces navales américaines), ont annoncé la phase de tests sur le terrain pour un prototype d’arme laser. Ce dernier, avec sa puissance actuelle d’environ 33kW serait déjà capable de neutraliser des petits bateaux et d’enflammer des drones en plein vol. La Navy a annoncé son désir de tester cette technologie sur le pont de l’USS Ponce, un navire militaire de transport et de débarquement. Et ce dès l’année prochaine.
Comme à chaque salon Euronaval, DCN présente un nouveau concept ship, c’est-à-dire une plateforme rassemblant les technologies en cours de développement et celles pressenties à moyen et long terme. Après les sous-marins futuristes SMX-21 et SMX-22 d’il y à deux ans, l’industriel s’est, cette fois, attaqué aux bâtiments de surface. Avec son « navire épée », le Swordship, DCN, précurseur en matière de furtivité avec les La Fayette (1996), a poussé la réduction de la signature à son paroxysme. « Nous allons le plus loin possible dans la furtivité et, avec le Swordship, on peut pratiquement parler de navire indétectable », explique Michel Accary, directeur Marketing & Nouveaux Produits de DCN. « C’est une technologie très difficile à maîtriser et seuls quelques pays sont capables de construire des navires vraiment performants en la matière. Après les La Fayette, beaucoup ont tenté de réaliser des bâtiments à la signature réduite mais, derrière les apparences des superstructures inclinées, les performances n’ont souvent pas été au rendez-vous ». Extérieurement, le bâtiment pourrait être assimilé à un mariage du destroyer américain DD(X) et du Littoral Combat Ship (LCS) du team General Dynamics / Austal, doté d’une coque catamaran. Toutefois, selon ses concepteurs, le Swordship va plus loin en matière de furtivité. Reprenant le systèmes des antennes planes, développé à partir des années 80 par les Américains, le Sworship ne dispose d’aucun aérien, l’ensemble des senseurs étant disposés dans une mâture unique et parfaitement intégrés à une superstructure pyramidale, sans la moindre aspérité. Le système antennaire ne se limite toutefois pas au bloc passerelle, des antennes radios et HF étant intégrées à l’ensemble de la coque, ce qui permet, au passage, de résoudre les problèmes de compatibilité électromagnétique : « C’est une vision à long terme de ce que peut être un bâtiment de surface et, dans cette perspective, nous atteignons le graal de la furtivité. Grâce à la simulation, on sait que la disparition du navire est faisable », précise Phlippe Goubault, architecte à DCN Ingénierie. Une passerelle à la Star Trek pour une bataille en réseauD’une longueur de 145 mètres pour une largeur de 33.6 mètres et un déplacement de 5300 tonnes en charge, le Swordship présente ce qui pourrait être une évolution majeure en matière de conduite du navire. La passerelle, dotée d’une vue à 360 degrés sur l’extérieur, dispose, en son centre, d’un central opération digne d’une salle du Futuroscope. Les opérateurs sont, en effet, entourés par un ensemble d’écrans circulaires donnant une vue virtuelle à 360° de la situation extérieure. Sur ces écrans, qui s’apparentent à certains simulateurs, les officiers pourront lire toutes les informations relatives aux plots détectés, aux forces alliées présentes dans le secteur ou encore aux moyens déployés par le navire, comme un hélicoptère ou des drones. « Le Warship management system doit donner à l’opérateur une visibilité élargie », souligne Philippe Goubault. Dans le concept du Swordship, les engins autonomes ont une place très importante : « Dans le futur, la guerre se fera par moyens déportés et les drones auront de plus en plus d’importance », affirme Jean-Pierre d’Hérouville, responsable des navires de surface à DCN. Le Swordship pourrait embarquer, en plus d’un hélicoptère lourd, trois drone d’1.5 tonne dans un hangar, situé sous la plateforme d’appontage. De plus, la mise en œuvre de deux drones de surface est également prévue. Dans cet horizon lointain, le concept voit la consécration de la guerre en réseau et des « systèmes de systèmes », avec une intégration très poussée de la coordination des navires entre eux, de la mutualisation de leurs moyens de détection et d’intervention, le tout intégrant également les engins déportés, drones aériens (UAV) et sous-marins (USV). Pour les ingénieurs, la poursuite des progrès en matière d’automatisation devrait aboutir, dans une vingtaine d’années, à des bâtiments de 5000 à 6000 tonnes armés par une quarantaine de personnes, soit presque 9 fois moins que sur une frégate comme le Duquesne (1970).
24 sous-marins et 54 navires de surface supplémentaires équiperont la Marine russe avant la fin de l’année 2020, a déclaré lundi le ministre russe de la Défense Sergueï Choïgou.
« En application du programme national d’armement pour la période de 2011-2020, la Marine recevra huit croiseurs sous-marins lance-missiles, 16 sous-marins polyvalents et 54 navires de surface de différentes classes », a précisé le ministre.
Selon lui, le renouvellement du parc de navires de guerre est crucial pour le développement de la Marine.
« Toutefois, il impossible de préserver le potentiel de combat de la Marine, si le niveau d’entretien technique n’est pas réalisé au niveau requis », a poursuivi M.Choïgou.
Le chef du département militaire a souligné que depuis 2011, l’entretien des bâtiments et navires de guerre russes était régi par un contrat de trois ans conclu avec le Consortium unifié de constructions navales.
Vidéo youtube
Publiée le 11 janv. 2013
Le sous-marin nucléaire Iouri Dolgorouki (SNLE) a été officiellement remis à la Marine lors d’une cérémonie qui s’est déroulée sur les chantiers navals Sevmach de Severodvinsk (nord de la Russie). http://fr.ria.ru/video/20130111/19719.
Le sous-marin Iouri Dolgorouki remis à la Marine russe
Article source: corlobe.tk : Par Rédacteur en chef. Publié le 1er mars 2013, dernière mise à jour le 1er mars 2013.
photo: blog.lefigaro.fr
La Chine a présenté lors du salon IDEX-2013, aux Emirats Arabes Unis, un nouveau modèle de sous-marin classique, le S20, et a dévoilé certaines de ses caractéristiques techniques.
Le sous-marin a été développé à partir du Type 041 (classe Yuan). Selon le site spécialisé Jane’s, la Chine, malgré ses réticences habituelles, a dû dévoilé certaines caractéristiques du nouveau sous-marin, compte-tenu de la concurrence sur le marché internationale, en particulier de la part des chantiers navals russes et allemands.
Le S20 mesure 66 m de long, 8 m de large et 8,2 m de haut. Il déplace 1.850 t en surface et 2.300 t en plongée. Il peut atteindre une vitesse de 18 nœuds en plongée, son rayon d’action est de 8.000 km à 16 nœuds. L’équipage du S20 est composé de 38 personnes, son autonomie en régime de croisière atteint 60 jours. Il dispose d’une double coque et peut plonger jusqu’à 300 m.
Contrairement aux sous-marins du Type 041 de la marine chinoise, les S20 ne sont pas équipés d’une propulsion anaérobie, bien qu’elle puisse être commandée séparément.
Le sous-marin chinois est équipé d’un sonar à fréquence variable, d’un intercepteur sonar et d’un système de mesure de son bruit propre. Il peut de plus être équipé d’un sonar remorqué. Le S20 est équipé de torpilles, de mines et des missiles anti-navires. La Chine ne donne pas de précisions sur les armes, mais indique que l’acheteur peut commander des torpilles, des missiles et des « torpilles anti-torpilles ».
Les sous-marins Type 041 ont été développés en Chine dans la 1ère moitié de la décennie 2000. Selon diverses sources, la marine chinoise en aurait 7 ou 8 en service et prévoirait d’en construire 15 au total.
Les sous-marins Type 041 sont plus gros : ils déplacent 4.000 t pour 75 m de long. Ils peuvent naviguer jusqu’à 20 nœuds. Ils sont équipés de tubes lance-torpilles de 533 mm, et peuvent lancer le missile anti-navires YJ-8X.
sous-marin le triomphant image source: staps.uhp-nancy.fr
Article source:zone.sousmarins.free.fr
1624
Le premier sous-marin est construit par Cornelis Drebbel.
1800
L’ingénieur américain Robert Fulton fut l’un des précurseurs en matière de sous-marin. En 1800, il tenta de vendre au gouvernement français un sous-marin pour couler les bateaux anglais. Mais les français rejetèrent l’offre de Fulton. Nommé le Nautilus, il faisait 6m.50 de long. Il pouvait replier son mât et ses voiles à plat sur le pont, puis plonger à une profondeur de 7,6 m.
1888
L’ingénieur Français Gustave Zédé fabrique le premier sous-marin à propulsion électrique, le Gymnote.
1898
L’ingénieur Irlandais John Philip Holland construit le premier sous-marin véritablement opérationnel et le dote d’un système de propulsion mixte essence-électricité.
1902
Apparition des premiers sous-marins équipés de périscopes.
1906
Les Allemands adaptent le moteur Diesel à leurs sous-marins.
1960
Le premier sous-marin nucléaire lanceur d’engin (SNLE) est construit aux Etat-Unis.
1960
Au début des années 1960, quelques petits sous-marins de poche ont été construits pour la recherche scientifique. Ces petits submersibles sont prévus pour transporter 2 ou 3 personnes.
2000
Les premiers sous-marins réellement AIP (anaérobie).
La véritable histoire Des sous-marins
A l’épreuve du feu : la première Guerre mondiale
En septembre 1914, le sous-marin allemand U9 coule trois croiseurs britanniques en quelques minutes.
C’est pendant la Première Guerre mondiale que les sous-marins ont eu pour la première fois un impact significatif. Les U-boote allemands entrent très tôt en action dans ce qui est appelé la première bataille de l’Atlantique. Ils utilisent de nouvelles tactiques propres aux forces sous-marines et une supériorité numérique afin de remporter les combats. Ce sont plus des submersibles que des sous-marins au sens moderne du terme. Ils opèrent principalement en surface avec des moteurs conventionnels et plongent uniquement pour attaquer. Leur coque a en général une coupe triangulaire avec une quille bien dessinée pour limiter le roulis en surface et une étrave marquée.
Les années folles
De nouveaux types de sous-marins apparaissent pendant l’entre-deux-guerres. Parmi les plus notables, on peut citer les sous-marins porte-avions. Ils sont équipés d’un hangar étanche et d’une catapulte à vapeur pour lancer et récupérer de petits hydravions. Le tandem sous-marin + avion sert d’unité de reconnaissance en avant de la flotte, un rôle essentiel avant l’arrivée du radar. Le premier exemple est le HMS M2 britannique suivi par le Surcouf français, et quelques autres dans la marine impériale japonaise. On notera que le Surcouf de 1929 est appelé « croiseur sous-marin ». Il avait une réelle capacité pour engager des navires en combat de surface.
Les sous-marins de la Seconde Guerre mondiale
Allemagne
L’Allemagne a possédé la plus grande flotte sous-marine de la Seconde Guerre mondiale. En effet, comme le traité de Versailles limitait le tonnage de sa marine de surface (la reconstruction de celle-ci n’a commencé en urgence qu’un an avant le début du conflit), cela ôtait tout espoir de pouvoir battre la Royal Navy et surtout la marine française largement supérieure. En conséquence, le haut Commandement allemand stoppa rapidement la construction des navires de surface à l’exception des cuirassés de classe Bismarck et de deux croiseurs, pour allouer le maximum de ressources à la construction des sous-marins qui vu leur tonnage dérogeaient au traité de Versailles. L’expansion des moyens industriels et le début de la production en série prit la majeure partie de l’année 1940. Au final, plus d’un millier de sous-marins seront construits avant la fin de la guerre.
L’Allemagne a utilisé ses sous-marins lors de la seconde bataille de l’Atlantique pour tenter de couper les routes de ravitaillement entre les États-Unis et l’Angleterre. Celles-ci sont alors vitales pour l’alimentation et l’industrie britannique mais aussi pour l’approvisionnement en armement venu des États-Unis. Si techniquement les U-boote ont été constamment améliorés pendant les années de guerre, l’innovation majeure concernera les communications cryptées avec l’invention de la machine Enigma. Elle permettra les fameuses tactiques d’attaques groupées en « horde de loups » initiées par l’amiral Dönitz. Revers de la médaille, Enigma est également à l’origine de la chute des U-boote. Dans un autre domaine, le transport de fret, les allemands ont développé le concept de sous-marin cargo ou ravitailleur. En fait, il s’agissait de pouvoir importer des matières premières rares mais essentielles à leur industrie de guerre et apporter un support logistique aux U-Boot combattants dans des zones lointaines.
Lors de leurs missions, les U-boote opéraient surtout seul en essayant de trouver les convois dans les zones qui leur étaient assignées par le Haut Commandement. Lorsqu’un convoi était repéré, le sous-marin n’attaquait pas immédiatement mais le suivait pour permettre à d’autres sous-marins présents dans le secteur de le rejoindre. Puis, ils attaquaient ensemble de préférence la nuit et en surface. Lors de la première partie de la guerre, les sous-marins remportèrent ainsi de nombreuses victoires. Dans la seconde moitié, l’Allemagne possède une flotte de sous-marins impressionnante mais la supériorité numérique est contrebalancée par l’accroissement du nombre de convois fortement protégés. L’utilisation en masse d’escorteurs, d’avions et l’apparition d’inventions comme le radar et surtout l’ASDIC compromettra le succès des Loups allemands. Le sous-marin étant très vulnérable en surface, les ingénieurs allemands ont alors étudiés un système de propulsion anaérobie (turbine Walter) qui, ajoutée à la propulsion Diesel et électrique, aurait pu permettre au sous-marin de rester plusieurs jours, voire dans les rêves les plus fou des concepteurs, plusieurs semaines de suite en plongée. Ces études ont été interrompues par la fin de la guerre et reprises notamment par l’URSS.
Winston Churchill a écrit que la menace des U-boote était la seule chose qui le faisait douter de la victoire finale des Alliés.
Japon
Le Japon possède à cette époque la flotte de sous-marins la plus hétéroclite du monde. On y trouve les torpilles humaines Kaiten, les sous-marins de poche de classe Ko-hyoteki ou Kairyu, des sous-marins côtiers, des sous-marins de ravitaillement, des sous-marins océaniques souvent dotés d’un avion, les sous-marins de classe I-200 ( la plus grande vitesse en plongée du conflit) et les I-400, des sous-marins pouvant emporter plusieurs bombardiers (les plus grands sous-marins de la WWII). Ces sous-marins étaient également dotés de la torpille la plus avancée de l’époque la Type 95 surnommée Long Lance à propulsion à oxygène.
Malgré leurs prouesses techniques, les sous-marins japonais n’ont eu que peu de succès au combat. Ils étaient malheureusement utilisés dans des missions offensives contre des navires de guerre plus manœuvrant et bien mieux défendus que les navires de commerce qui étaient les cibles privilégiés des U-boote. Cependant quelques réussites sont notables. En 1942, les sous-marins japonais coulent deux porte-avions, un croiseur et plusieurs destroyers. Ils en endommagent plusieurs autres ainsi qu’un navire de ligne. Ils n’arriveront pas à soutenir ce rythme suite au renforcement des flottes alliées. À la fin de la guerre, les sous-marins seront utilisés pour le transport de ravitaillement vers les différentes îles occupées.
Les premiers modèles japonais n’étaient pas très manœuvrant en plongée. Ils ne pouvaient pas plonger très profond et ne disposaient pas de radar. A la fin du conflit, plusieurs sous-marins japonais seront envoyés à Hawaii pour inspection dans ce que l’on a appelé l’opération Road’s End. Ils seront sabordés en 1946 lorsque l’URSS demandera également à les étudier.
Pendant la WWII, le Japon a coulé environ un million de tonnes de tonnage marchand (184 navires), contre 1,5 million de tonnes pour le Royaume-Uni et ses alliés (493 navires), 4,65 millions de tonnes par les États-Unis (1 079 navires) et 14,3 millions de tonnes pour l’Allemagne (2 840 navires).
États-Unis
Pendant ce temps, les États-Unis utilisent leurs sous-marins pour attaquer les navires de commerce (ce que l’on a appelé la « guerre de course ») reprenant ainsi à leur compte la doctrine allemande afin de couper le ravitaillement des îles japonaises du Pacifique.
Alors que le Japon dispose des meilleures torpilles de la guerre, les États-Unis ont probablement la plus mauvaise, la Mark 14 à vapeur dont les détonateurs à influence et à contact, ne sont pas fiables. Pendant les vingt premiers mois du conflit, les commandants en chefs des forces sous-marines attribuèrent les ratés des torpilles aux mauvaises tactiques et manœuvres des commandants. Ce n’est qu’à la mi-1943 que des tests sérieux seront enfin réalisés pour vérifier les détonateurs. En septembre 1943, un nouveau modèle de torpille est mis en service, c’est la Mark 18. D’après ses constructeurs elle a fait l’objet de grandes innovations. Elle est supposée ne pas laisser de trace de sillage donc d’être discrète et en plus elle est réputée être extrêmement fiable. Malheureusement la Mk 18 avait pour défaut de parfois décrire des cercles sans prévenir (retour lanceur). L’USS Tang et l’USS Tullibee seront perdus en 1944 après avoir été touchés par leur propre torpille tirée d’un tube arrière et l’USS Wahoo a été sévèrement endommagé de la même façon.
Pendant la WWII, l’US Navy aura mis en service 314 sous-marins. Le 7 décembre 1941, 111 bateaux sont opérationnels alors que seulement 38 d’entre eux sont considérés comme « modernes » seuls 23 d’entre eux seront perdus. Plus tard, sur les 203 sous-marins de classe Gato, Balao et Tench mis en service, 29 seront perdus. Au total 3 506 sous-mariniers américains trouveront la mort pendant la guerre.
Les défenses anti-sous-marines japonaises s’avérèrent d’abord peu efficaces. Les grenades sous-marines étant souvent réglées à une profondeur trop faible. Cette information sera maladroitement révélée au grand public par le député Andrew J. May dans une conférence de presse en juin 1943. Bien évidemment cette information arriva rapidement aux oreilles de l’amirauté japonaise. Cette boulette occasionnera un changement radical de la tactique japonaise et coûtera aux États-Unis la perte de dix sous-marins et 800 membres d’équipage.
Vers la fin du conflit, les japonais commenceront à utiliser des détecteurs d’anomalie magnétique et des avions pour couler les sous-marins américains.
On respire mieux avec le schnorchel.
Les sous-marins Diesel ont besoin d’air pour faire tourner leurs moteurs en surface et emportent donc d’énormes batteries pour obtenir la capacité de navigation sous-marine. En plongée, ceci limite leur vitesse et leur rayon d’action. Le schnorchel est initialement une invention hollandaise d’avant guerre. Le concept a été utilisé et développé sur les sous-marins allemands pour utiliser les moteurs Diesel juste sous la surface (immersion périscopique) afin d’éviter la détection visuelle et radar, le but étant de recharger les batteries en toute discrétion et renouveler l’air du bord. La marine allemande a également expérimenté des moteurs au peroxyde d’hydrogène en rencontrant de grandes difficultés techniques. Parallèlement les Alliés ont testé différentes techniques pour détecter un sous-marin navigant au schnorchel dont des senseurs chimiques pour « renifler » l’échappement des sous-marins.
Ils naviguent le plus souvent sous l’eau, du sous-marin moderne au rêve de Jules Vernes.
Dans les années 1950, l’énergie nucléaire arrive comme une alternative à la propulsion Diesel-électrique. Des procédés sont également développés pour extraire l’oxygène de l’eau de mer. Ces deux innovations permettront aux sous-marins de rester immergés pendant plusieurs semaines voire plusieurs mois et autoriseront des marées jusque là impossibles. La croisière de l’USS Nautilus au pôle Nord sous la calotte glacière de l’Arctique en 1958 a démontré le considérable potentiel de l’utilisation de l’énergie nucléaire à bord d’un sous-marin réalisant ainsi le rêve de Jules Vernes. La plupart des sous-marins militaires construits depuis cette époque aux États-Unis et en Union soviétique sont propulsés par des réacteurs nucléaires. Les facteurs limitant pour la durée en plongée deviendront alors la quantité de vivres et le moral de l’équipage dans l’espace confiné du bord.
Cependant, les puissances nucléaires, hors Etats-Unis, et les autres pays ont continué à produire des sous-marins Diesel-Electrique. Ces sous-marins que l’on appelle désormais conventionnels avaient jusque dans les années 90 l’avantage d’être plus silencieux en plongée que les nucléaires, sauf lorsqu’ils utilisaient leur moteur Diesel pour recharger leurs batteries. Mais depuis, les avancées technologiques dans l’atténuation des sons et l’isolation phonique ont diminué cet avantage. Même s’ils sont moins rapides et peuvent emporter moins d’armes, les sous-marins conventionnels demeurent redoutables. De plus, comme ils sont moins chers à la construction et grâce à l’arrivée des sous-marins anaérobie le nombre de ces unités a considérablement augmenté tout comme le nombre d’acquéreurs.
Pendant la guerre froide, les États-Unis et l’Union soviétique ont maintenu de grandes flottes de sous-marins, engagés dans des poursuites de type « chat et souris » avec en guest stars la France et le Royaume Unis. Cette tradition perdure aujourd’hui, sur une échelle plus réduite mais avec de nouveaux joueurs tels que les chinois et les quelques quarante autres pays détenteur d’au moins un sous-marin.
L’Union soviétique a perdu au moins quatre sous-marins pendant cette période : le K-129 en 1968, le K-8 en 1970, le K-219 en 1986 et le Komsomolets en 1989 ; d’autres, comme le K-19, ont été gravement endommagés par des fuites radioactives. A la même époque les États-Unis perdirent deux sous-marins nucléaires : l’USS Tresher et l’USS Scorpion. En France ce sont les drames de la Minerve et de l’Eurydice, deux sous-marins du type Daphné qui endeuillèrent la famille des sous-mariniers.
Depuis la fin de la seconde guerre mondiale la France a conçu et mis en service les sous-marins Diesel-Electrique type Narval, Aréthuse, Daphné, le prototype Gymnote, et les Agosta. Les sous-marins à énergie nucléaire SNLE type le Redoutable puis le Triomphant et les SNA type Rubis.
Depuis l’origine, 1 600 sous-mariniers français ont donné leur vie aux forces sous-marines.
« Lorsqu’un équipage embarque et que le panneau se referme derrière lui, chaque sous-marinier incarne ce qu’un être humain peut donner de meilleur. » Mr FALCO, lors de l’inauguration du Monument National des Sous-mariniers disparus en mer (Nov 2009).
Histoire des sous-marins
1887 : Le premier sous-marin moderne, le Gymnote, est construit par le français Gustave Zédé.
1904 : L’ingénieur français Maxime Laubeuf construit un submersible équipé d’un périscope et qui eut la faveur de la marine de l’époque. Il fonctionnait à la vapeur, mais ne pouvait effectuer que de brèves plongées grâce à sa propulsion électrique, c’est le Narval.
De 1914 à 1918 : Les submersibles fonctionnant grâce à une propulsion à moteur diesel, purent être engagés en grand nombre durant la guerre. Très vite les sous-marins disposèrent d’une propulsion mixte : diesel pour la navigation en surface et électrique pour la plongée. Unebatterie d’accumulateurs alimente le moteur électrique. Les accumulateurs sont rechargés par une génératrice entrainée par le moteur diesel, lors des navigations en surface.
1944 : Les U-boot Allemands peuvent continuer à utiliser leur propulsion diesel, lors de faible plongée, grâce à un tuyau d’une quinzaine de mêtres qui débouche à la surface de l’eau (le snorkel), qui alimente en air le moteur diesel
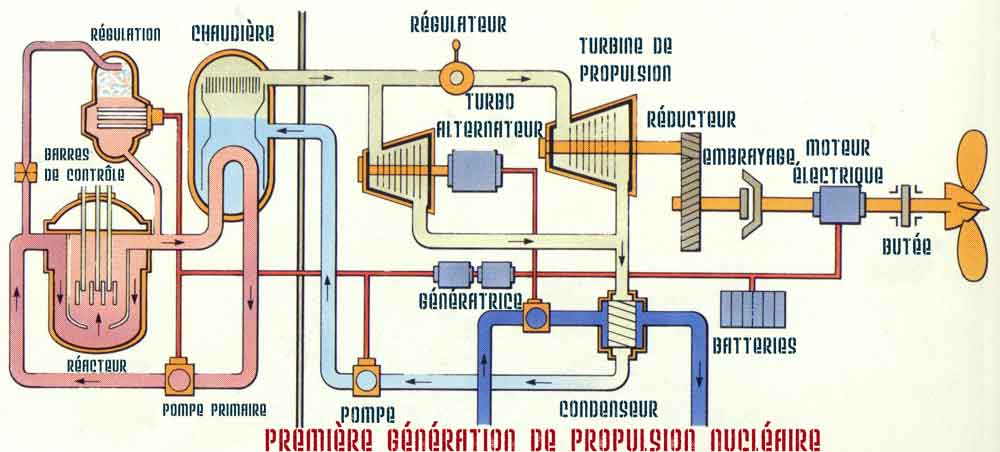
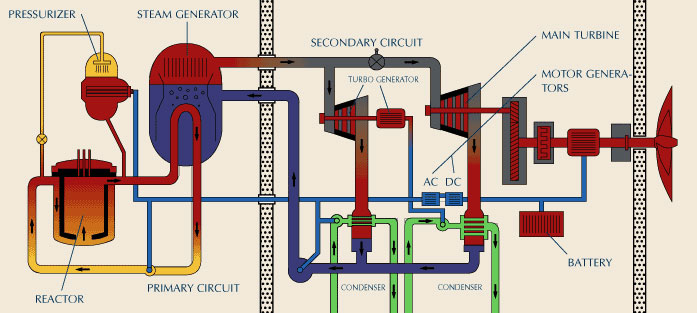
Années 1950, Sous-marins à propulsion nucléaire. Les hélices sont entrainées par des turbines à vapeur. Cette vapeur est produite par un réacteur nucléaire à eau et fourni toute l’énergie nécessaire au sous-marin pour qu’il puisse naviguer en plongée durant de très longues périodes.
Technologie des sous-marins
Les sous-marins possèdent :
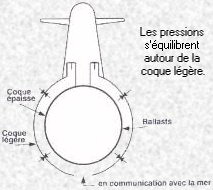
Une coque intérieure, épaisse, conçue pour résister à la pression de l’immersion.
Une coque extérieure mince qui assure l’hydrodynamisme (faculté physique à se déplacer rapidement dans l’eau) dans le cas des double-coques.
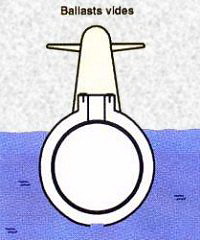
Des ballasts situés entre les deux coques (ou aux extrémités) et dont leur manoeuvre (introduction ou chasse d’eau de mer) permet les manoeuvres du bâtiment (plongée ou remontée).
Des centrales inertielles pour assurer la stabilité du bâtiment.
Des moyens de communication, utilisant des ondes à très basse fréquence qui pénètrent de quelques mètres sous la surface.
De nombreux moyens de détection : périscopes de veille et d’attaque, radars et appareils d’écoute microphonique.
Des armes : torpilles sous-marines, missiles aérodynamiques ou balistiques.
La production d’énergie à bord des sous-marins:
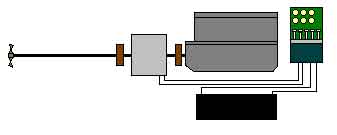
Les premiers temps
Propulsion où le moteur électrique est en ligne avec le diesel.
La batterie (rectangle noir) alimente un moteur à courant continu en plongée.
En surface ou au schnorchel le diesel entraîne la ligne d’arbre et le moteur devient générateur pour recharger la batterie.
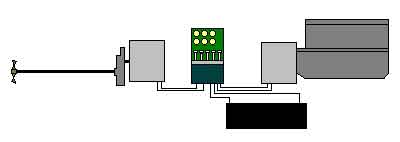
Aujourd’hui pour les SSK:
Le moteur électrique entraîne la ligne d’arbre via un réducteur. Le diesel entraîne une dynamo ou un alternateur.
La batterie alimente le moteur.
La batterie est rechargée par le groupe électrogène.
Propulsion à 2 lignes d’arbres
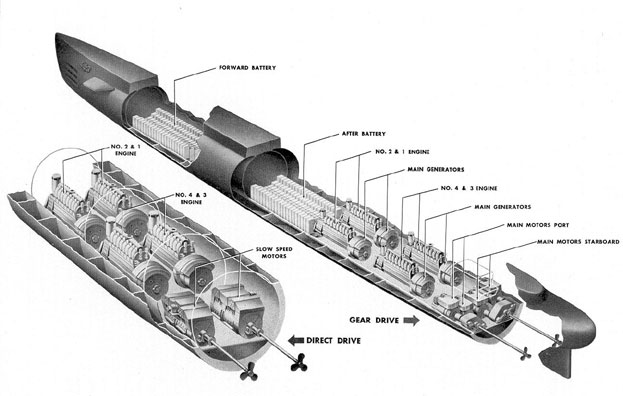
La propulsion dite « nucléaire »
Comment ça marche un sous-marin ?
Article source: netmarine.net
La navigation sous-marine a tenté les hommes depuis des siècles. Les progrès de la technique l’ont rendu possible. Elle obéit à deux grands principes, les principes de Pascal et d’Archimède, qui s’appliquent à tous les corps immergés.
Le principe de Pascal
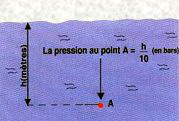
Plus on descend, plus la pression augmente.
Sur la surface d’un corps immergé, s ‘exerce une pression, en bars, perpendiculaire à cette surface, dirigée vers l’intérieur et égale au nombre de dizaines de mètres d’immersion.
Ainsi, à l’immersion de 100 mètres s’exerce une pression de 10 bars (appliquée sur l cm2) par rapport à la pression atmosphérique. Toute augmentation de 10 mètres de profondeur s’accompagne d’une augmentation de pression de 1 bar. Appliqué au sous-marin, ce principe permet de comprendre que les forces croissantes qui s’exercent sur la coque, tendent à l’écraser. La « coque épaisse » abrite le personnel et le matériel. Elle est construite en acier très résistant. Son épaisseur est calculée en fonction de l’immersion maximum prévue par le programme militaire du bâtiment.
Approximativement, pour une augmentation de 100 mètres de la profondeur d’immersion maximale, il faudrait augmenter l’épaisseur de la « coque épaisse » de 10 millimètres afin de compenser les efforts dûs à l’accroissement de la pression. Par contre certains éléments extérieurs du sous-marin, tels les ballasts ou les soutes, sont maintenus pleins de liquide, en communication avec la mer, lorsque le sous-marin est en plongée. Les pressions des deux côtés des parois s’équilibrent. Il n’est pas nécessaire dans ce cas de les construire en tôles épaisses, donc lourdes. Leur épaisseur varie de 5 à 10 millimètres.
Le principe d’Archimède
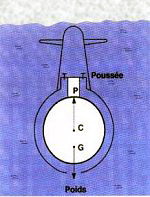
Tout corps plongé dans un liquide reçoit de la part de ce liquide une poussée verticale dirigée de bas en haut, égale au poids du volume de liquide déplacé.
Le sous-marin dans l’eau de mer est soumis à deux forces :
– son poids, appliqué au centre de gravité (G), force verticale dirigée de haut en bas. Elle tend à faire descendre le sous-marin.
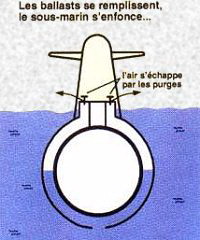
– la poussée d’Archimède, appliquée au centre du volume immergé (C), force verticale dirigée vers le haut. Elle tend à faire remonter le sous-marin. L’équilibre est obtenu quand le poids de l’eau déplacée, c’est à dire la poussée, correspond au poids du sous-marin. Considérons le sous-marin en surface. Les ballasts sont totalement vides d’eau de mer. La partie supérieure émerge. Le sous-marin flotte, il est donc en équilibre. Le poids du volume d’eau déplacé est bien égal au poids du sous-marin. Si l’on ouvre la purge des ballasts, ils se remplissent d’eau. Le sous-marin s’alourdit et s’enfonce. Le poids du volume d’eau supplémentaire déplacé, qui correspond à une augmentation de même valeur que la poussée, est égal au poids de l’eau contenue dans les ballasts. Un nouvel équilibre statique est donc obtenu. A chaque volume d’eau ajoutée, le sous-marin s’enfonce un peu plus et trouve un nouvel équilibre.
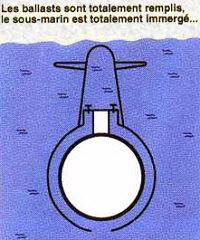
En immersion maximale les ballasts sont totalement pleins d’eau de mer. Si l’on vide les ballasts en remplaçant l’eau de mer par de l’air contenu dans des bouteilles d’air situées à l’intérieur du sous-marin. Le poids du sous-marin diminue du poids du volume d’eau évacué des ballasts : la poussée, que l’on appelle aussi déplacement en plongée, est supérieure au poids du bâtiment. Le sous-marin est « léger », il remonte jusqu’à ce que la valeur de la poussée diminuant avec la hauteur de l’immersion, on obtient un nouvel équilibre poids/poussée.
On dit que le sous-marin flotte toujours entre deux eaux
Si le poids du sous-marin devenait plus élevé que la poussée qu’il reçoit, il coulerait au fond de la mer et ne pourrait plus remonter (c’est pourquoi dès la conception du sous-marin il faut étudier avec précision son poids pour définir le volume des ballasts et éviter ainsi que le sous-marin ne sombre). Or, le volume des ballasts, arrêté à la construction, est constant. Il faut donc régler le poids du sous-marin lui même en fonction des ballasts pour que l’on puisse toujours obtenir l’égalité Poids=Poussée. Cette opération appelée « la pesée », est réalisée lors des premiers essais à la mer. Mais il ne suffit pas que le sous-marin soit en équilibre statique. Il faut aussi qu’il puisse naviguer droit et qu’il puisse rester dans cette position.
Trois données entrent alors en jeu :
L’assiette d’un sous-marin définit son inclinaison longitudinale. C’est l’angle alpha que fait le fond du sous-marin avec l’horizontale. Elle dépend de la position du centre de gravité c’est à dire de la répartition des poids dans la coque, par rapport au centre de poussée. Si le sous-marin est trop chargé à l’arrière, il s’incline, l’angle alpha est positif l’assiette est positive. Inversement s’il est trop chargé à l’avant, l’assiette est négative. Si alpha est nul, le bâtiment est horizontal. Il est en assiette zéro.
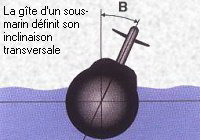
La gîte d’un sous-marin définit son inclinaison transversale. C’est l’angle B que fait l’axe longitudinal du plan transversal avec la verticale. Si le sous-marin est trop chargé à bâbord, il s’incline vers la gauche on dit qu’il y a de la gîte sur bahord. De même s’il est trop chargé à tribord, il y a de la gîte sur tribord.
La stabilité d’un sous-marin est la qualité qu’il possède dc revenir en assiette zéro (position 1′ horizontale) et sans gîte, lorsqu’il est écarté de cette position pour une raison quelconque: houle, mouvement de poids à l’intérieur du sous-marin, etc… Pour une meilleure stabilité, il faut abaisser au maximum le centre de gravité et pour cela, il importe de placer les installations les plus lourdes dans les fonds du sous-marin. Ainsi, lorsqu’il navigue, le sous-marin subit constamment des variations de poids, dues notamment à la consommations dc vivres dc carburants (variations en -), ou à des entrées accidentelles d’eau de mer ( variations en +). Il subit aussi des variations de centre de gravité, par exemple si tout l’équipage se déplace en même temps vers l’avant du bateau pour une séance de cinéma On doit donc en permanence effectuer la ‘pesée du sous-marin » c’est à dire l’ensemble des opérations qui concourent à rétablir l’égalité Poids=Poussée, pour faire naviguer le bâtiment en plongée en assiette zéro et sans gîte. Pour cela il dispose dc caisses à eau spécifiques (régleurs, compensateur, caisses d’assiette).
(Source : Plaquette d’information DCN Cherbourg)
Mise à jourinvestigation océanographique et oanis, le : 02/03/2013, 18h40.
Sir Richard Branson passe à l’étape suivante avec sous-marin baptisé Virgin Oceanic. Il vient d’annoncer, la création d’une entreprise à part entière du même nom, qui promet de faire de la plongée dans les plus profonds des cinq océans de la Terre, le tout dans les deux prochaines années. Le sous-marin a été conçu par Graham Hawkes et sera piloté par Chris gallois sur sa première plongée au fond de la fosse des Mariannes cette année. Ils sont tous deux des partenaires de Branson, et Branson lui-même ira visiter la fosse de Porto Rico lors de la seconde mission. Sans surprises, l’un des objectifs de l’équipe est d’établir un record du monde, mais ils ont également l’intention de mener des recherches scientifiques en cours de route, et sont déjà en train de réfléchir à la prochaine génération de véhicules qui pourraient recueillir des échantillons et permettre des recherches plus étendues.
Le sous-marin de la classe Kilo destiné au Vietnam impressionne l’OTAN
Le concept de trous noirs dans l’Univers nous est familier. Des générations entières de chercheurs se consacrent à l’étude de la nature physique de ce phénomène. Et les experts militaires se sont mis récemment à évoqué un nouveau phénomène : celui «des trous noirs dans l’océan».
A la différence des trous dans l’Univers, il s’agit d’une métaphore. C’est ainsi que les spécialistes de l’OTAN ont surnommé les sous-marins diesel-électriques du projet 636 et de la classe Kilo. Leur navigation silencieuse, qui les rend difficiles à détecter, leur a valu ce surnom, explique Viktor Litovkine, expert militaire et rédacteur en chef adjoint deNezavisimoïe voiennoïe obozrenie (Revue militaire indépendante).
«Ce sont de très bons sous-marins avec un bon équipement militaire à bord : des torpilles, des mines et des missiles. Ils sont équipés de systèmes de missiles antinavire supersoniquesClub, qui ont déjà fait leurs preuves sur les sous-marins fournis à la marine indienne par la Russie».
Les sous-marins de la classe Kilo sont une modification duVarchavianka que l’URSS a commencé à construire pour l’exportation il y a 30 ans. Les sous-marins de la classe Kilo conservent les principales caractéristiques et l’architecture des sous-marinsVarchavianka, mais leur équipement électronique est tout à fait moderne. En immersion, ces navires peuvent atteindre une vitesse de 37 km/h, descendre à 300 mètres de profondeur avec une autonomie maximale de 45 jours.
Deux de ces sous-marins seront expédiés au Vietnam courant 2013. Construits à Saint-Pétersbourg, ils ont été mis à l’eau pour des tests en mer Baltique. Au total, en vertu du contrat russo-vietnamien, le pays devrait recevoir six sous-marins de la classe Kilo. Ce contrat dont d’un montant de deux milliards de dollars, devrait être finalisé d’ici à 2016.
« Il est difficile de surestimer l’importance de ces sous-marins pour le Vietnam »,commente Viktor Litovkine. « Grâce à ces navires, ce pays pourra défendre efficacement ses eaux territoriales, sa zone économique maritime, ses îles et ses plateformes pétrolières. La flotte classique et la flotte sous-marine doivent agir ensemble. Les navires de surface doivent être protégés par les forces sous-marines. Et vice-versa : la sortie des sous-marins en mer doit être protégée par les navires en surface, surtout s’il s’agit d’une sortie dans des eaux éloignées».
Le Vietnam est un partenaire traditionnel de la Russie dans le domaine de la coopération militaro-technique. La part de la Russie sur le marché des armements du Vietnam s’est montée à 90% au cours de la dernière décennie. Les armuriers russes ont un carnet de commandes étrangères chargé. Mais le problème de l’approvisionnement de l’armée russe et de la marine reste primordial.
Le cas de la livraison de sous-marins au Vietnam est un cas exceptionnel, en principe les commandes nationales passent devant les commandes étrangères. T
Mise à jour investigationocéanographique et oanis, le : 27/02/2013, 18h10.
Nous vous proposons un projet de type nouveau concernant la classe des submersibles.
Un extrait de l’article de Le point . fr publié Par JEAN GUISNEL le 18 mai 2010, pour le SMX 24 la suite sera à lire sur le site de cette même source.
De même pour la présentation du SMX 25, artilce du télégramme.com.(du 27 octobre 2010).
D’ après DCNS, Au sein d’une force navale, le SMX-25 est plutôt vu comme un éclaireur, chargé par exemple de recueillir des renseignements, ou bien, grâce à ses moyens d’action vers la terre (nettoyage de plages par des commandos ou frappes contre des cibles terrestre via ses missiles de croisière) de préparer une zone à l’arrivée d’une force de projection. Il n’est, en revanche, pas optimisé pour le combat sous-marin, sa dotation, défensive, se limitant à quatre torpilles prêtes à tirer dans quatre tubes situés à la proue.
source:lepoint.fr/
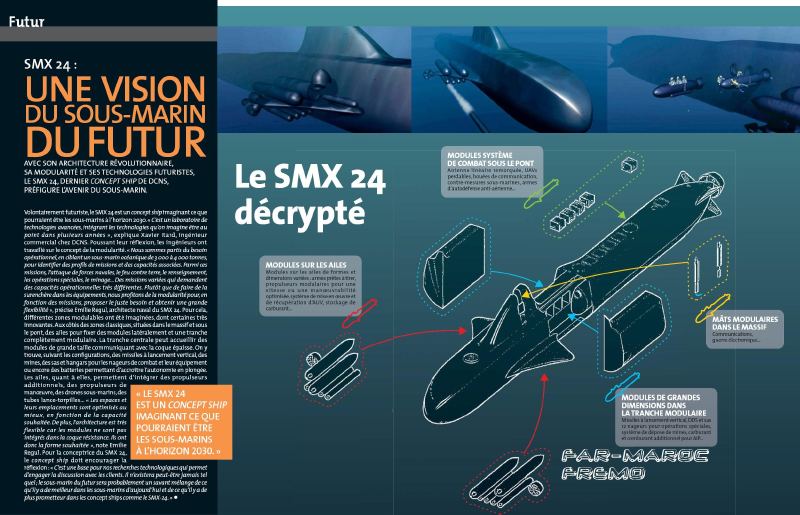
Dans sa revue Naval Experts, la société DCNS revient sur son concept de sous-marin du futur, le SMX 24, dont nous publions ci-dessous quelques images conçues sur ordinateur. Ce « gros » sous-marin (3.500 tonnes), qui n’existe pour l’instant qu’au stade de projet et cherche encore son premier client, présente la particularité d’être modulaire et adaptable à toutes sortes de missions. Suite
Mi-bateau, mi-submersible, le SMX-25, imaginé par le bureau d’ingénierie de DCNS Lorient, a été présenté en avant-première au salon Euronaval du Bourget. (crédit DCNS)
DCNS-Lorient (56). Un sous-marin de surface présenté à Euronaval
C’est le dernier né des bureaux d’ingénierie de DCNS Lorient: SMX-25 a été présenté en avant-première au salon Euronaval du Bourget. Le concept? Un sous-marin de surface.
SMX-25. Un nom futuriste pour un projet qui ne l’est pas moins: un sous-marin de surface aussi rapide sur l’eau qu’efficace en plongée. Mi-bateau, mi-submersible, SMX-25, sorti tout droit de l’imagination des ingénieurs de DCNS Lorient, veut marquer les esprits. «On s’impose tous les deux ans un projet un peu provocateur. Ce salon est le moment idéal pour sortir des sentiers battus», affirme Xavier Itard, le directeur de la ligne de produit sous-marins de DCNS, en marge du rendez-vous international.Une vitesse record La première tôle de ce bâtiment, de 109 mètres de long pour un déplacement de 2.800 tonnes en surface (4.700 en plongée), n’est sans doute pas prête d’être découpée. «Mais ce concept peut exprimer un besoin du marché et l’intérêt de futurs clients».SMX-25, c’est d’abord un monstre de rapidité. Le bâtiment, avec sa carène profilée (en perce-vagues) et spécialement adaptée à la navigation de surface, est capable d’atteindre des vitesses de 38 noeuds. Un record pour un sous-marin conventionnel qui atteint en général péniblement 8à 10 noeuds. Puissant, le sous-marin, manoeuvré par 27 hommes d’équipage, revendique aussi une autonomie de 2.000 milles nautiques. «Avec ce bâtiment, doté d’une propulsion de trois hydrojets et de trois turbines à gaz, on veut changer l’ordre des choses». Dans l’esprit des ingénieurs, SMX-25 devient l’avant-garde d’une force navale, capable de se déployer rapidement sur une zone de conflit. Discret et d’une réelle furtivité (sa signature radar ne dépasse pas celle d’un bateau de pêche en surface), le bâtiment se révèle redoutable pour faire du renseignement ou utiliser ses 16 missiles de croisière antiaériens, terrestres ou contre des navires. Sa plateforme d’ascenseur de 7 mètres peut servir de force de projection à des commandos ou de rampe de lancement à des drones aériens et sous-marins.
Brève présentation des machines d’exploration ou de maintenance employées par l’homme pour accéder aux grands fonds, avec un rapide historique que propose l’auteur de cette vidéo, simple mais efficace.
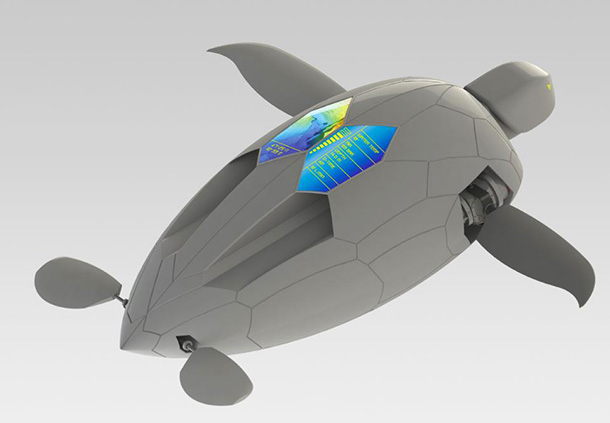
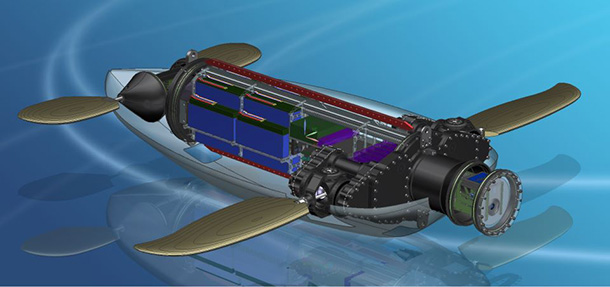
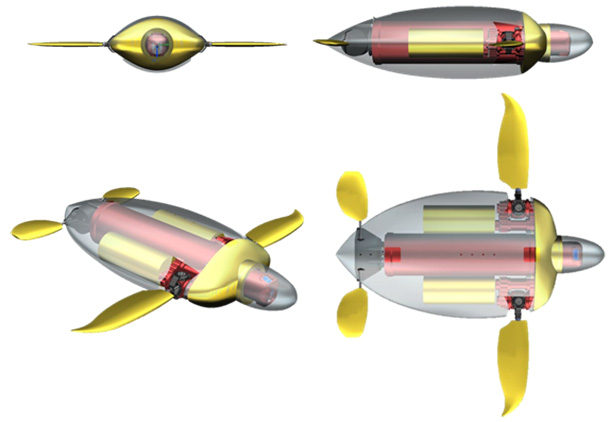
Une équipe de chercheurs suisses est en train de mettre au point une tortue d’eau robotisée bourrée de capteurs pour récolter des mesures à des profondeurs allant jusqu’à cent mètres.
Naro (Nautical Robot) est le nom du projet entrepris par une équipe d’ingénieurs en mécanique de l’ETH de Zürich, en Suisse. L’équipe développe des robots sous-marins autonomes (lesAUVs) capables de remplir différentes missions sous l’eau. La particularité de leurs robots réside dans leur système de propulsion à ailettes imitant le mode de déplacement naturel des mammifères marins.
Par rapport aux robots poissons existants, un robot tortue présente l’avantage d’être moins compliqué à fabriquer car il est fait de matériaux non flexibles. Ensuite, la surface de la carapace de la tortue va permettre de placer un plus grand nombre de capteurs et l’équiper de batteries plus grandes pour d’avantage d’autonomie. Enfin, un troisième atout de la carapace est que le robot est suffisamment rigide pour pouvoir supporter du poids sur lui.
Le robot en développement, le Naro – Tartaruga sera capable d’enregistrer les premières mesures sur la consommation d’énergie d’un système de propulsion à ailettes.
Le corps du robot est fait entièrement en aluminium et est pourvu de quatre nageoires, deux grandes à l’avant, deux petites à l’arrière. Le système de propulsion est innovant de par son principe. Par un système de trois vérins qui agissent indépendamment sur chaque nageoire, celles-ci peuvent s’orienter à 360°. Ce système agit comme économiseur d’énergie car il ne nécessite pas de moteurs montés en série ni de câblages.
La tortue mesure 1 mètre de long, pèse 75 kg, se déplace sous l’eau à la vitesse de 2 m/s, et peut atteindre des profondeurs allant jusqu’à 100 mètres.
Le premier plongeon du Naro – Tartaruga est prévu à la fin du mois. Suivez le robot tortue sur la page Facebook.
Article source:.humanoides.fr/
Mise à jourinvestigation océanographique et oanis, le:12/02/2013, à: 21h05.