INVESTIGATION OCEANOGRAPHIQUE ET OANIS Nos questions Ufologiques nous orientent vers le cosmos, cependant certaines réponses pourraient venir des Abysses
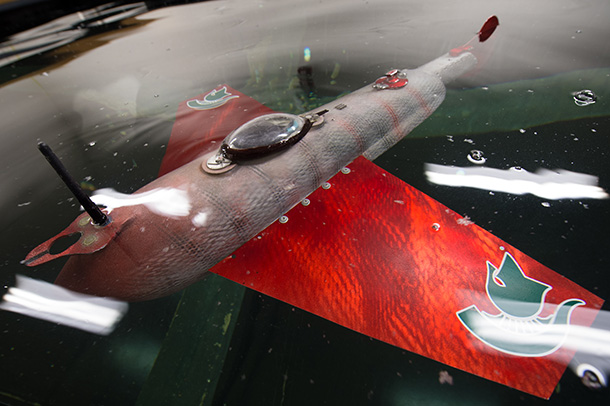
Une équipe de chercheurs de l’Université du Michigan a construit un grand poisson robotisé capable de parcourir environ 200 km sans besoin de recharger ses batteries. Pendant qu’il navigue sous l’eau, ce poisson géant autonome collecte des données sur la qualité de l’eau.
L’équipe du Pr. Xiaobo Tan a baptisé ce robot Grace pour Gliding Robot ACE car il se déplace dans l’eau en glissant grâce à son fuselage et à ses ailes. Le fuselage renferme le secret du déplacement de l’appareil. Posée sur un rail allant de la tête à la queue de Grace, la batterie sert de contre-poids pour faire monter ou faire piquer le nez du robot.
Et Grace économise ainsi beaucoup d’énergie. Le seul moment où il en pompe le plus est lorsqu’il entame un mouvement d’inversion de trajectoire, du haut vers le bas et vice-versa. Sinon, le reste du temps, Grace convertit sa flottabilité en poussée vers l’avant à l’aide de ses ailes et d’un aileron à l’arrière.
Il n’est pas très rapide ni très maniable, mais il peut se déplacer pendant très longtemps, sur près de 200 km sans besoin de recharger ses batteries.
Pendant ce temps Grace fait des prélèvements dans l’eau pour contrôler la qualité de l’eau. Il envoie en temps réel les analyses d’échantillons d’eau effectuées que ses capteurs effectuent.
Une autre de ses caractéristiques est d’être le plus petit robot subaquatique à pouvoir détecter la pollution des eaux. Sa taille lui permet de pouvoir évoluer dans les lacs et autres petites surfaces peu profondes. Il a d’ailleurs été testé avec succès dans les eaux de Kalamazoo, une rivière qui coule dans l’Etat du Michigan.
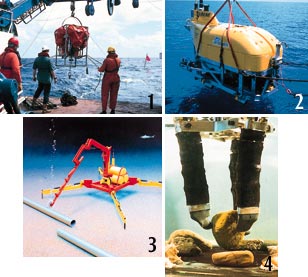
L’exploration des eaux profondes des océans et des caractéristiques des fonds sous-marins (y compris de leur géologie) serait irréalisable sans le développement d’équipements très spécialisés. De nouvelles technologies sont indispensables pour permettre aux chercheurs d’étudier l’environnement pélagique souvent dangereux. Dans le cadre de nombreux projets soutenus par le programme MAST (Sciences et Technologies marines) de l’Union européenne, des chercheurs mettent au point des technologies dans ce domaine, à l’instar de nombreux projets EUREKA coordonnés par le « parapluie » EUROMAR. En voici quatre exemples.
1. Projet ALIPOR– Ce submersible entièrement automatisé descend jusqu’au fond des mers pour y effectuer des expériences, y recueillir des données et, mission accomplie, remonter à la surface.
2.SIRENE est une navette télécommandée qui installe, avec une extrême précision, des laboratoires sous-marins jusqu’à 6000 mètres deprofondeur, en utilisant un système de communication télé-acoustique de pointe.
3.Le projet ROMAN, lancé dans le cadre du parapluie EUROMAR, a mis au point un robot capable, à grande profondeur, d’effectuer des travaux lourds et de remplacer les plongeurs dans des situations dangereuses.
4. AMADEUS est un programme de recherche visant à améliorer la dextérité et les capacités sensorielles des systèmes sous-marins télécommandés de manipulation. Sur la photo, un prototype capable de recueillir des échantillons d’organismes, de sédiments ou de roches avec une très grande précision.
extrait de l ‘ article
L’exploration des grands fonds
à la source cliquez sur la bannière planète ocean en haut de l ‘article.
Mise à jourinvestigation océanographique et oanis, le 22/01/2013, 13h45.
Les entreprises du complexe militaro-industriel russe pourraient relancer dès 2013 la production des sous-marins du projet 677 « Lada ». De nouvelles batteries et des systèmes électriques indépendants de l’air atmosphérique seront installés sur ces appareils. Les sous-marins restent un domaine très prometteur de la coopération militaire entre la Russie et les pays de la région Asie-Pacifique.
Photo : RIA Novosti
Les sous-marins du projet 677 Lada devraient remplacer les submersibles à propulsion diesel-électrique du projet 636 Varchavianka (appelé KILO selon la classification occidentale). Ces navires sont une version améliorée du projet soviétique 877 Paltus. Les navires des projets 877 et 636 sont construits pour la Marine russe, mais une grande partie de ces navires est exportée. Ainsi, la marine chinoise possède 12 sous-marins de ce projet et 6 bâtiments du projet 636 ont été commandés par le Vietnam, dont le premier a été mis à l’eau récemment.
Le premier sous-marin du projet 677 a été remis à la flotte russe de la Baltique en 2010. A la différence de ses prédécesseurs, il sera doté d’un armement plus lourd, d’un système de contrôle plus efficace et aura une signature radar réduite. Mais les tests ont révélé des lacunes techniques qui ne pourront être corrigées qu’avec le temps. En 2011, le commandement de la flotte a annoncé la suspension de la construction d’une série de sous-marins du projet 677. Toutefois en 2012, il a été décidé de reprendre la construction. Selon les experts, il ne s’agit pas uniquement de corriger les défauts. Il faut également moderniser substantiellement ces sous-marins.
LeKronstadt, un des bâtiments de cette série, sera équipé d’une batterie modernisée lithium-ion. Elle augmentera considérablement la durée d’immersion du sous-marin. La construction du Kronstadt devrait être achevée en 2015. Le deuxième bâtiment, le Sébastopol, pourrait être équipé d’un système électrique indépendant de l’air atmosphérique – une première pour la flotte russe. Cette installation permet de recharger les batteries du sous-marin sans qu’il remonte à la surface, ce qui permettra aux sous-marins à propulsion diesel-électrique d’avoir les propriétés techniques d’un sous-marin nucléaire.
Les nouveaux sous-marins occidentaux sont également équipés de ces systèmes. Ainsi, les derniers sous-marins chinois du type Yuan possèdent également des systèmes électriques indépendants de l’air extérieur, construits sur la base du moteur Stirling. Actuellement, plusieurs types de systèmes énergétiques ont été mis en place, et chacun a ses avantages et ses inconvénients. Ces systèmes sont complexes, coûteux et pas toujours fiables. Ainsi, l’inconvénient du moteur Stirling est sa faible puissance pour la masse et les dimensions importantes de l’appareil.
Le système électrique russe est basé sur des principes différents. Comme pour l’installation du sous-marin allemand de type 212, il utilise des piles à combustible à hydrogène. L’hydrogène est produit à bord du navire grâce à un générateur électrochimique particulier. Après l’élimination des problèmes techniques, la Russie a l’intention d’exporter les sous-marins de type Lada (le projet d’exportation s’appelle « Amur-1650 »).
L’Asie qui va devenir le marché privilégié de ces sous-marins. Une véritable course aux armements se déroule actuellement en Asie Orientale. Le Japon, compte tenu du renforcement de la marine chinoise, a augmenté sa flotte sous-marine à 22 bâtiments. Ayant maîtrisé la construction des types modernes de sous-marins, la Corée du Sud est également en train de mettre en œuvre un programme de développement pour sa flotte sous-marine. Par ailleurs les pays de l’ASEAN, le Vietnam, l’Indonésie et le Singapour, développent très rapidement leurs propres flottes sous-marines. Tous ces programmes sont mis en œuvre grâce à une aide internationale de grande envergure.T
Les entreprises du complexe militaro-industriel russe pourraient relancer dès 2013 la production des sous-marins du projet 677 «Lada ». De nouvelles batteries et des systèmes électriques indépendants de l’air atmosphérique seront installés sur ces appareils. Les sous-marins restent un domaine très prometteur de la coopération militaire entre la Russie et les pays de la région Asie-Pacifique.
Les sous-marins du projet 677 Lada devraient remplacer les sous-marins diesel-électriques du projet 636 Varchavianka (appelé KILO selon la classification occidentale). Ces navires sont une version améliorée du projet soviétique 877 Paltus. Les navires des projets 877 et 636 sont construits pour la Marine russe, mais une grande partie de ces navires est exportée. Ainsi, la marine chinoise possède 12 sous-marins de ce projet et 6 bateaux du projet 636 ont été commandés par le Vietnam, dont le premier a été mis à l’eau récemment.
Le premier sous-marin du projet 677 a été remis à la flotte russe de la Baltique en 2010. A la différence de ses prédécesseurs, il sera doté d’un armement plus lourd, d’un système de contrôle plus efficace et aura une signature radar réduite. Mais les tests ont révélé des lacunes techniques qui ne pourront être corrigées qu’avec le temps. En 2011, le commandement de la flotte a annoncé la suspension de la construction d’une série de sous-marins du projet 677. Toutefois en 2012, il a été décidé de reprendre la construction. Selon les experts, il ne s’agit pas uniquement de la correction des défauts. Il faut également moderniser substantiellement ces sous-marins.
LeKronstadt, un des bâtiments de cette série, sera équipé d’une batterie modernisée lithium-ion. Elle augmentera considérablement la durée d’immersion du sous-marin. La construction du Kronstadtdevrait être achevée en 2015. Le deuxième bateau, Sébastopol, pourrait être équipé d’un système électrique indépendant de l’air atmosphérique – une première pour la flotte russe. Cette installation permet de recharger les batteries du sous-marin sans qu’il remonte à la surface, ce qui permettra aux sous-marins diesel-électriques d’avoir les propriétés techniques d’un sous-marin nucléaire.
Les nouveaux sous-marins occidentaux sont également équipés de ces systèmes. Ainsi, les derniers sous-marins chinois du type Yuanpossèdent également des systèmes électriques indépendants de l’air extérieur, construits sur la base du moteur Stirling. Actuellement, plusieurs types de systèmes énergétiques ont été mis en place, et chacun a ses avantages et ses inconvénients. Ces systèmes sont complexes, coûteux et pas toujours fiables. Ainsi, l’inconvénient du moteur Stirling est sa faible puissance pour la masse et les dimensions importantes de l’appareil.
Le système électrique russe est basé sur des principes différents. Comme pour l’installation du sous-marin allemand de type 212, il utilise des piles à combustible à hydrogène. L’hydrogène est produit à bord du navire grâce à un générateur électrochimique particulier. Après l’élimination des problèmes techniques, la Russie a l’intention d’exporter les sous-marins de type Lada (le projet d’exportation s’appelle « Amur-1650 »).
C’est l’Asie qui va devenir le marché privilégié pour ces sous-marins. Une véritable course aux armements se déroule actuellement en Asie Orientale. Le Japon, compte tenu du renforcement de la marine chinoise, a augmenté sa flotte sous-marine jusqu’à 22 navires. Ayant maîtrisé la construction des types modernes de sous-marins, la Corée du Sud est également en train de mettre en œuvre un programme de développement pour sa flotte sous-marine. Par ailleurs les pays de l’ASEAN, le Vietnam, l’Indonésie et le Singapour, développent très rapidement leurs propres flottes sous-marines. Tous ces programmes sont mis en œuvre grâce à une aide internationale de grande envergure.T
Pour ce qui est de l’ingénierie aéronavale, les hydravions sont des inventions assez extraordinaires , certains sont sans doute restés en état de projets et ainsi restés au stade de prototypes, je vous présente quelques spécimens via cet article ci-dessous.
En complément 2 vidéos une youtube à visionner directement ici, l’autre sur dailymotion.
Dès le milieu des années 60 – en pleine guerre froide – les services secrets occidentaux, principalement américains mais également britanniques, sont intrigués par un aéronef géant construit par les Soviétiques. Surnommé » le monstre de la Caspienne » pour avoir été repéré sur cette mer grâce à des prises de vue de satellites espions américains, l’aéronef intrigue.Désigné » KM » par les Russes, l’appareil appartient à cette famille, connus sous l’appellation générique d’Ekranoplane (littéralement avion de surface). En réalité, c’est une bonne dizaine d’appareils de masses et tailles différentes qui sont sortis des bureaux d’études Alekseyev de Nijni-Novgorod, au cours des quarante dernières années.L‘Ekranoplanese présente comme un hybride entre l’avion et l’hydravion. Son principe de sustentation consiste à s’appuyer sur un énorme coussin d’air d’une dizaine de mètres d’épaisseur. Un avion au décollage et à l’atterrissage crée naturellement le coussin en question ; d’où parfois le » refus » qu’oppose l’avion à toucher la piste à l’atterrissage.Sur l’Ekranoplane, ce phénomène dit » d’effet de surface » est amplifié par deux artifices. L’un, utilisé à basse vitesse, consiste à diriger les gaz d’échappement des moteurs sous la voilure, dont les volets ont préalablement été abaissés, créant ainsi un » caisson de pression » qui permet d’obtenir un premier niveau de sustentation.L’autre artifice vise à utiliser les vortex d’extrémité de voilure (les fameux tourbillons marginaux dont on s’efforce de réduire les effets sur un avion classique) en les renvoyant directement sur la surface de l’eau, leur énergie étant alors convertie en force de pression pour le coussin d’air. Telle est en tout cas dans ses grandes lignes l’explication que les concepteurs de l’Ekranoplane fournissent sur le principe permettant de créer la sustentation de leur navire volant.Mais au-delà de ces principes révolutionnaires de sustentation, ce qui fascine, c’est le gigantisme des prototypes sortis des cartons des bureaux d’études du constructeur Alekseyev. Le monstre de la Caspienne pèse quelque 550 tonnes (soit 150 tonnes de plus que le B-747-400, la plus grosse version du Jumbo-jet) et son fuselage mesure 100 m de long !L’autre artifice vise à utiliser les vortex d’extrémité de voilure (les fameux tourbillons marginaux dont on s’efforce de réduire les effets sur un avion classique) en les renvoyant directement sur la surface de l’eau, leur énergie étant alors convertie en force de pression pour le coussin d’air. Telle est en tout cas dans ses grandes lignes l’explication que les concepteurs de l’Ekranoplane fournissent sur le principe permettant de créer la sustentation de leur navire volant.Mais au-delà de ces principes révolutionnaires de sustentation, ce qui fascine, c’est le gigantisme des prototypes sortis des cartons des bureaux d’études du constructeur Alekseyev. Le monstre de la Caspienne pèse quelque 550 tonnes (soit 150 tonnes de plus que le B-747-400, la plus grosse version du Jumbo-jet) et son fuselage mesure 100 m de long !Cet appareil qui effectua son premier vol le 18 octobre 1966est considéré dans l’Union soviétique de l’époque comme un aéronef dont les applications militaires sont évidentes. Sa vitesse de 600 km/heure, à 3 m au-dessus de l’eau, présentait bien des avantages tactiques pour le transport de matériel d’assaut.L’appareil, équipé de 10 turboréacteurs (8 installés sur des moignons d’ailes raccordés à la partie supérieure avant du fuselage et 2 flanqués de part et d’autre d’un pylône central logé légèrement en arrière du cockpit) surprend par sa configuration. Au cours de ses vols expérimentaux, le KM a démontré, selon son constructeur, l’aptitude de la formule à ne faire apparaître aucune limite de poids et de taille, pour la construction d’aéronefs s’inspirant de son principe.C’est du reste la raison pour laquelle, le KM est en réalité un prototype unique destiné à valider une formule, dans la perspective de construire un Ekranoplane plus gigantesque encore, puisque l’objectif est alors de développer un appareil de 1500 tonnes, de charge utile pouvant voler à 900 km/h !Alors que les Russes commencent à largement s’ouvrir à l’Occident pour prolonger leurs recherches interrompues faute de crédit, certains spécialistes américains estiment, même au début des années 90, que l’on peut, sur la base du principe de sustentation de l’Ekranoplane, envisager la construction d’un appareil de 5 000 tonnes.
Parmi eux, Stephan Hooker estime même que plus l’appareil est gros, plus il est capable de s’affranchir de la poussée de motorisation, puisque la portance du coussin d’air augmenterait plus vite que la taille de l’appareil. Cet expert, qui étudia l’Ekranoplane pour le compte de la DIA (Défense Intelligent Agency), estime même que la finesse aérodynamique (rapport existant entre la portance et la traînée de frottement à l’avancement) d’un Ekranoplane géant pourrait atteindre 30, autrement dit serait de 50 % à 70% meilleure que sur un avion de transport de type classique.
Une théorie dont la validité, à vrai dire, n’a jamais été vérifiée, même les ingénieurs russes, dont nul n’ignore que l’imagination et l’enthousiasme n’ont guère de limite lorsqu’ils sont habités par un projet grandiose, revoient à la baisse l’évaluation de leur collègue américain : » II est difficile d’imaginer des moteurs suffisamment puissants pour propulser un tel appareil. 5000 tonnes n’est pas réaliste, 1000 tonnes en revanche l’est. » déclare Dimitri Sinitsyne, l’un des compagnons de route d’Alekseyev.
Entre le projet de construire un appareil de l 500 tonnes de charge utile et la visite d’un groupe d’étude américain, trente années ont passé, amenant les ingénieurs aéronautiques russes à mieux considérer les limites qu’imposent les effets incontournables d’échelle à la construction d’un avion. En 1980 – sans que l’on en connaisse réellement les raisons – le monstre de la Caspienne disparaît dans un accident. D’après son constructeur, l’accident serait imputable à une erreur de pilotage.
Les Ekranoplanes
I. L’Orlyonok
Deuxième grand programme mené à bien par les Russes : l’Orlyonok, conçu entre 1968 et 1970, testé en vol pour la première fois en 1973 et mis en service en novembre 1979 par la Marine russe. La formule du KM est reprise, le principe de sustentation aussi, mais la configuration générale de l’appareil est assez différente de celle du monstre de la Caspienne.
La propulsion est tout d’abord assurée par deux hélices contrarotatives, montées en extrémité supérieure de la dérive, les moteurs de démarrage (des turbines NK 8) étant logés à l’intérieur de la partie avant du fuselage légèrement en arrière du poste de pilotage. L’Orlyonok est, en 1979, le premier Ekranoplane opérationnel dans le monde.
En service dans la marine russe, pour assurer des missions de transport logistique et tactique d’assaut, l’Orlyonok mesure 58m de long, pour une envergure de 31m et pèse 140 tonnes au décollage. Il évolue à la vitesse de 400 km/h en croisière rapide (375 km/h en vitesse économique) et possède une autonomie de 1500 km en étant capable de transporter 150 hommes et leur matériel (ou 30 personnes et 40 tonnes de charge utile). Au démarrage, deux turbofans de 10,5 tonnes de poussée unitaire assurent la » lévitation » de l’appareil, la croisière étant confiée à un turbopropulseur de 10000 kW de poussée unitaire.
L’un des aspects intéressant de l’Orlyonok réside dans le domaine du vol : il peut être utilisé à basse altitude sur une mer avec des creux de 3 m mais se trouve également en mesure d’atteindre un plafond de 3 000 m, particularité qui élargit sérieusement les possibilités d’utilisation de l’appareil.
Les Ekranoplanes
I. Le Lun
Plutôt inspiré du » monstre de la Caspienne « que de l’Orlyonok, le Lun, développé au milieu des années 80, se situe à mi-chemin entre la vedette rapide lance-missiles et le Super Jumbo à effet de surface. Quelques caractéristiques le font apparaître comme l’appareil pouvant- dans la famille Ekranoplane – avoir le plus de chance de devenir un programme d’avenir.
L’Ekranoplane de combat, à l’origine du Lun qui entre en 1990 dans la Marine, affiche une masse maximale opérationnelle de 400 tonnes et, une vitesse de croisière de 550 km/h. Contrairement à l’Orlyonok et au KM, Le Lun n’a pas de turbomoteurs de démarrage séparés.
Les motorisations de démarrage et de croisière sont réunies en un seul et même ensemble, constitué de deux fois quatre turboréacteurs de 10 tonnes de poussée unitaire qui assument simultanément la propulsion des phases décollage et croisière.
L’appareil, équipé de 3 batteries doubles de missile mer-mer (de type Moskit) et de 3 radars de surveillance et d’acquisition d’objectifs, mesure 74 m de long et 44 m d’envergure. Lui aussi présente la particularité de pouvoir voler à une altitude relativement élevée (pour ce type de formule) puisque, s’il faut en croire son constructeur, le Lunpeut » croiser » à 500 m d’altitude.Sa charge utile est annoncée pour 40 tonnes seulement mais sa capacité d’emport en hommes est plus intéressante dans la perspective d’une application de transport de passagers, puisqu’elle est de l’ordre de 400 places sur 3 000 km.
Les Ekranoplanes
I. Le Spasatel
Le Spasatel, un Ekranoplane géant dédié aux missions de recherche et sauvetage ou de transport rapide d’hydrobase à hydrobase pèserait 390 tonnes et présenterait pour avantage, par rapport à l’hydravion classique, de pouvoir se poser sur une mer dont les creux atteindraient 4 m.
En mission haute densité, le Spasatel pourrait accueillir jusqu’à 600 rescapés à son bord et rester sur les lieux d’un naufrage pendant cinq jours. Autre avantage, sa rapidité de mise en oeuvre : 15 minutes suffisent au Lun pour opérer entre l’alerte et le décollage.
Une version plus spécialement dédiée au transport aérien classique et de fret est également envisagée. L’argument économique évoqué par Igor Vasilevsky, il est vrai, incite à la réflexion.
Selon lui, en effet » le transport d’une même charge utile par navire et par Ekranoplane revient à un coût identique, mais l‘Ekranoplane a pour lui d’acheminer cette charge beaucoup plus rapidement. « Quant à l’avion, toujours selon l’héritier putatif d’Alekseyev : « II assume cette même mission plus vite mais pour un coût au moins deux fois supérieur. « La question se pose de savoir si ces avions ne sont pas, de par leur conception, trop lourds et si les marges de centrage très étroites n’affectent pas la stabilité de l’appareil en vol. De plus, on observera qu’ils volent à des altitudes extrêmement faibles, là où la consommation de carburant est énorme.
Dans ces conditions, imaginer qu’un Ekranoplane puisse franchir une distance de 16 000 km, comme cela fut envisagé dans un projet d’avion de transport de 250 tonnes capable d’accueillir 400 personnes au début des années 90, laisse pour le moins dubitatif. A contrario, certains objectent que malgré l’ouverture à l’Ouest, les ex-Soviétiques ont préservé certains secrets qui battent en brèche les certitudes des détracteurs de la formule.
Si tel est alors le cas, il se pourrait que la prévision faite par un spécialiste, selon laquelle l’Ekranoplane imaginé en 1954 pourrait être le moyen de transport surprise du XX siècle, soit vérifiée dans l’avenir. Car on ne voit pas pourquoi alors que 80 % de l’économie mondiale sont concentrés sur une bande de terre de 60 km de large à partir des côtes, le transport aéro-maritime se priverait de cet extraordinaire atout que serait alors l’invention du génial Rotislav Yevgenievich, né en 1916 et disparu en 1980 et plus connu sous le pseudonyme d’Alekseyev.
La Marine de guerre russe sera dotée de drones sous-marins, a indiqué le chef de département du Groupe unifié de construction navale (OSK) Anatoly Chemov. Selon lui, cette idée a apparu à la fin des années 1980.
A la fin de 1989 il a été décidé de ne pas accomplir des missions spéciales à l’aide des sous-marins avec l’équipage. Les militaires ont estimé qu’il est mieux d’accomplir les missions anti-diversion avec les moyens robotisés. Ces dernires peuvent effectuer des missions tant militaires que civiles, dit l’expert Vladimir Chtcherbakov :
« Il s’agit de l’examen du fonds maritime. On peut aussi faire exploser les navires ennemis, etc. ».
Mais des experts disent qu’il est plus efficace de lutter contre les navires ennemis avec les mines et les torpilles. Par contre, les drones sous-marins peuvent liquider les champs de mines. La mise au point des drones demande les moyens financiers considérables ainsi que la technique perfectionnée, mais ni les civils, ni les militaires ne pourront se passer de ces drones ce qui est confirmé par l’expérience d’autres pays, dit Vladimir Chtcherbakov :
« Parmi eux nous voyons les USA, la France, la Grande-Bretagne, la Suède ou le Japon. Leurs drones sont destinés tant aux militaires qu’aux civils ».
En Russie, ce matériel est utilisé lors des travaux sous-marins à destination civile.
Les experts prédisent que la mise au point des drones sous-marins va s’intensifier.
Un événement important se produira cet automne dans l’histoire de la Marine russe. Pour la première fois depuis l’effondrement de l’URSS, des sous-marins, construits d’après des nouveaux projets, intégreront la flotte militaire.
Dans le cadre du programme national de l’armement pour la période 2011-2020, la flotte devrait recevoir au moins 16 sous-marins nucléaires, ce qui va certainement augmenter la capacité de la flotte. Mais on ignore pour l’instant à quel point la marine russe sera renforcée.
Le croiseur sous-marin « Iouri Dolgorouki » du projet 955 sera certainement le primier à intégrer la flotte militaire de Russie. Actuellement le navire passe des tests finaux. En même temps, le missile balistique R-30 Boulava fera officiellement partie de l’armement russe. La mise en service d’un des plus importants navires porte-missiles marquera la fin de l’épopée de la création du nouveau complexe d’armement stratégique qui doit faire partie de l’arsenal de la marine nucléaire. Après « Iouri Dolgorouki», ce sera au tour d’une série de navires porte-missiles, dont la construction commence à s’accélerer au chantier naval Sevmach. Le second navire de la série « princière », « Alexandre Nevski », sera donné à la flotte avant le début de 2013. Les deux porte-missiles devront se rendre dans la région du Pacifique, sur la base de Viliutchinsk.
Le troisième navire, « Vladimir Monomaque », devra bientôt être mis à l’eau. Cet événement devrait se produire en automne2012, ou en hiver 2013, tandis que l’exploitation de « Vladimir Monomaque » est prévue pour 2014. La construction du quatrième navire porte-missiles, le « Kniaz Vladimir » (Prince Vladimir) a déjà considérablement avancé, tout comme l’élaboration des navires de cinquième et de sixième série. Si les travaux vont avancer avec ce rythme, on peut espérer que la mise en service des huit navires du projet 955 sera réalisée vers les années 2020-2023.
Les navires porte-missiles de ce nouveau projet sont nombreux et au fur et à mesure que le financement augmente et la chaîne de production s’améliore, le rythme de travail s’accélère au chantier naval. Ainsi, il a fallu 17 ans pour descendre « Iouri Dolgorouki » sur l’eau, tandis que pour les navires « Alexandre Nevski » et « Vladimir Monomaque », ce délai représentera à peine 8 ans. Ensuite, les délais de construction devraient être réduits jusqu’à 6 ans.
Le rythme de construction des sous-marins nucléaires lanceurs d’engins (SNLE) laissent l’espoir que le plan de la mise en exploitation de huit nouveaux porte-missiles sera réalisé d’ici à 2020. Et en parallèle, des sous-marins construits encore à l’époque soviétique continuent à être exploités par la Marine russe. Six navires SNLE du projet 667BDRM« Dauphin » vont continuer à servir la flotte russe jusqu’en 2020, et un ou deux navires porte-missiles du projet précédent 667BDR devraient également être concervés dans la marine.
Dans les conditions actuelles, le principal problème de la flotte militaire de Russie, c’est le développement de la production des missiles Boulava. Les SNLE du nouveau projet doivent être équipés chacun de 16 missiles. Pour les navires du projet amélioré 955A, il en faut 20 pour chaque navire. Ainsi, en tout, pour huit porte-missiles, 148 missiles Boulava devront être fabriqués, sans compter la réserve des armes pour les tests supplémentaires et les exercices militaires. Cela signifie que la production des missiles R-30 devrait atteindre au minimum 170-180 armes. A l’heure actuelle, « Iouri Dolgorouki » est entièrement équipé de missiles, et « Alexandre Nevski » le sera bientôt.
Ces chiffres inspirent confiance en ce qui concerne la sûreté de la partie maritime du bouclier nucléaire national. Cependant, l’état général des forces sous-marines russes est loin d’être idéal. La flotte militaire de Russie manque par exemple de navires multi-cibles, capables d’agir dans des environnement différents. Ce sont ces navires qui sont nécessaires pour le soutien des forces russes dans les zones de conflit et la destruction des porte-missiles ennemis en cas de guerre nucléaire.
Les mini-sous-marins habités( note perso- spécialité iranienne ) et les véhicules sous-marins sans pilote occupent une place de plus en plus importante dans les marines des différents pays du monde, et sont utilisés dans des buts très différents, autant pour des missions militaires, que des missions de recherche.
Ces systèmes permettent d’augmenter considérablement l’efficacité des navires de surface et des sous-marins, car ils permettent d’assurer une surveillance constante et méticuleuse de la zone sous-marine. Le navire de sauvetage de la Marine russe Igor Beloussov sera équipé de véhicules sous-marins autonomes pour des missions de sauvetage et de recherche en eaux profondes.
Des moyens pour atteindre inaccessible
Les véhicules sous-marins, conçus initialement comme des outils pour étudier les fonds marins, et destinés aux travaux de recherche et de sauvetage, sont désormais utilisés pour des buts différents.
Les premiers robots sous-marins sont apparus dans les années 1950-1960, mais le véritable boom de ces systèmes multifonctionnels a commencé à la fin des années 1990.
C’est alors qu’est apparue la possibilité technologique de produire des appareils inhabités capables d’effectuer des opérations complexes sans l’intervention de l’homme.
Ces systèmes étaient d’une grande aide dans des situations où l’utilisation des appareils avec l’équipage serait trop risquée ou techniquement impossible.
Les robots sous-marins sont capables de faire face sans l’intervention de l’homme aux mines et à d’autres obstacles sous-marins.
Ils permettent également d’augmenter la portée de détection des systèmes de sonars sous-marins.
Ils sont par ailleurs capables de contrôler et de réparer les objets sous-marins, d’explorer les fonds et la colonne d’eau.
Ces tâches vont au-delà des missions des militaires : ces caractéristiques sont nécessaires autant pour la marine, que pour des organismes de recherche.
Les premiers robots sous-marins prenaient trop de place et ne pouvaient pas être utilisés depuis les bateaux et sous-marins conventionnels. Des supports spéciaux étaient construits pour que ces robots puissent être utilisés.
Il s’agit notamment du sous-marin nucléaire SSN-23 « Jimmy Carter » de la marine des Etats-Unis, qui est exploité actuellement. Le prototype du sous-marin classique multifonction du type « Seawolf » a été modifié encore au stade de la construction pour qu’il puisse être compatible avec des robots sous-marins.
Les véhicules spéciaux submersibles qui sont utilisés actuellement dans la marine russe, fournissent de nombreuses opportunités pour travailler avec des systèmes multifonctionnels habités et non habités.
La technologie de miniaturisation permet actuellement de créer des robots sous-marins semblables à des torpilles, des mines sous-marines, voire même des systèmes de taille beaucoup plus petite. Grâce à l’interface des commandes des sous-marins, ces dispositifs peuvent être utilisés depuis des navires submersibles classiques.
A la poursuite du leader
Les possibilités des nouveaux sous-marins russes dans ce domaine sont des secrets d’Etat.
Il est donc difficile de juger si la marine russe est en retard par rapport à ses concurrents étrangers. Toutefois, même si l’équipement des différents appareils sous-marins des services de recherche et de sauvetage de la marine russe est en retard par rapport à ses analogues étrangers, ce retard est en train d’être rattrapé.
En plus de Igor Beloussov, qui sera équipé d’un robot sous-marin et de deux caméras habitées, le Service de sauvetage sous-marin de la Marine de Russie a également reçu au cours de ces dernières années plusieurs appareils autonomes de type Panthère de fabrication britannique.
Les appareils de descente en eaux profondes Rus et Konsul de fabrication russe sont également devenus très précieux pour la marine, car ils peuvent être utilisés non seulement pour les travaux de sauvetage, mais aussi pour des missions de recherche. Konsul serait notamment capable de plonger au moins à 6500 m de profondeur selon les résultats des tests auxquels il a participé.
Le Konsul a été construit en Russie, mais ses prédécesseurs, les submersibles de type Mir, sont de fabrication finlandaise, commandés par l’URSS. Le point faible des appareils russes, c’est qu’ils contiennent un pourcentage important de composants étrangers, notamment les composants électroniques, et des systèmes mécaniques de précision.
Malheureusement ce problème ne peut pas être résolu par la simple augmentation des commandes pour des véhicules sous-marins. Pour ce faire, le secteur industriel, spécialisé dans la fabrication de ces systèmes, ne doit pas se limiter exclusivement au secteur militaro-industriel.
Sinon, ces industries de haute technologie, comme des plantes issues d’une serre, se trouvent fragilisées et risquent de mourir à chaque changement climatique,comme cela s’est déjà produit dans les industries de haute technologie du complexe-militaro-industriel soviétique après 1991.
Un robot sous-marin élaboré par des institutions françaises vient d’entamer sa première mission en Méditerranée. Les données récoltées permettrons aux scientifiques de mieux comprendre comment évoluent les mers et océans en fonction des changements environnementaux.
Il s’appelle SeaExplorer, est capable d’aller jusqu’à 700 mètres de profondeur et d’analyser des données scientifiques récoltées dans l’océan. Le prototype, développé conjointement par divers corps scientifiques et entreprises françaises de la région Provence-Alpes-Côte d’Azur (Paca), est le premier planeur sous-marin de ce type développé en France. Plus précisément, c’est le « premier système robotique français de ce type« , a précisé Hervé Claustre, directeur de recherche du CNRS à l’Observatoire océanologique de Villefranche-sur-mer cité par l’AFP.
Aujourd’hui, l’engin a entamé sa première mission en Méditerranée. SeaExplorer a d’ailleurs été mis à l’eau depuis Villefranche-sur-mer dans les Alpes-Maritimes. Son autonomie énergétique d’environ deux mois, lui permettra d’effectuer des trajets en s’éloignant jusqu’à 50 kilomètres des côtes. L’appareil a été conçu pour relever diverses mesures comme la température, la salinité, la concentration en produits chimiques ou encore celle en phytoplancton. Il lui suffit ensuite de remonter à la surface pour déployer son antenne et envoyer des données aux chercheurs. En analysant les données transmises aux laboratoires, ces derniers espèrent alors mieux comprendre comment évoluent les écosystèmes marins en fonction des changements environnementaux.
En réalité, les scientifiques de la région utilisent depuis cinq ans des planeurs sous-marins de fabrication américaine, déployés entre la Corse et Nice. Néanmoins, le robot français, muni de batteries rechargeables, pourrait permettre des trajectoires plus précises et plus flexibles, estiment-ils. « Je cherche d’abord un engin performant pour faire ma science« , souligne Hervé Claustre, ajoutant que « les industriels ont évidemment envie de rentrer sur ce marché« , qui offre toutes sortes d’applications.
Ainsi, le SeaExplorer d’un coût d’environ 100.000 euros se veut plus performant que ses semblables élaborés par les Etats-Unis. D’ailleurs, de nombreuses applications ont déjà été imaginées pour le futur de ce robot sous-marin comme la détection de méduses, d’hydrocarbures ou encore la recherches des boites noires d’avions perdues en mer.
MQ-4C Triton. C’est le nom du futur drone de surveillance maritime de la marine américaine, qui sera réalisé dans le cadre du programme Broad Area Maritime Surveillance (BAMS). Conçu à partir du RQ-4 Global Hawk, mis en service en 1999 dans l‘US Air Force, le Triton a été officiellement dévoilé par Northrop Grumman au cours d’une cérémonie qui s’est déroulée le 14 juin à Palmdale, en Californie. Ayant nécessité quatre ans de développement, ce drone à grand rayon d’action complètera la flotte d’avions de patrouille maritime (P-8A Poseidon, P-3C Orion), permettant de concentrer ces appareils sur leurs missions prioritaires, à commencer par la lutte anti-navire et anti-sous-marine.
Le MQ-4C Triton est donc dérivé du RQ-4 Global Hawk Block 20, un drone de 39.9 mètres d’envergure et plus de 14.6 tonnes de masse maximale au décollage, pouvant voler à la vitesse de310 noeuds et à une altitude maximale de 60.000 pieds. Propulsé comme son aîné par un turboréacteur, le futur UAS (Unmanned Aircraft System) de la Navy sera capable de couvrir une distance de 2000 milles, l’autonomie du Global Hawk étant de 36 heures. Le Triton sera équipé du radar multifonctions AN/ZPY-3, spécialement conçu pour les opérations maritimes. Ce senseur a été testé pour la première fois en vol en décembre dernier à bord d’un Gulfstream.
Cinq RQ-4 Global Hawk ont été cédés par l’Air Force à la Navy afin de tester les capacités du système dans un environnement et des opérations navales. L’un d’eux s’est accidentellement crashé le 12 juin près de la base aéronavale de Patuxent River. Les expérimentations vont se poursuivre afin de déterminer les spécifications exactes du premier démonstrateur, qui sera suivi par un deuxième engin. Les trois premiers systèmes devraient être commandés en 2014, 13 autres suivant entre 2015 et 2017. En tout, l’US Navy compte se doter de 68 MQ-4C Triton.








")






")




")
")



")
")

")

")

")






















